For this project, I wanted to investigate bridging the gap between my computer and the physical world. I split my computer screen into 6 white squares ( a 3 x 2 matrix). I then created a physical representation of these squares with a 3 x 2 matrix of Red Led’s. The physical matrix represents which square my mouse is within the screen. As the mouse moves into a new square, that square turns red on the screen and the corresponding LED turns on. This system consisted of a Processing Application to determine where the mouse was on the screen, run the screen display, and pass that location on to the Arduino Program using serial communication. The Arduino program then controlled the physical pixel matrix. Video is below: (Video Here) Processing Code:
import processing.serial.*;
Serial port;
String colorO = “#FFFFFF”;
String colorC = “#FF0000”;
void setup()
{
size(900, 600);
noStroke();
frameRate(10);
// List all the available serial ports in the output pane.
// You will need to choose the port that the Arduino board is
// connected to from this list. The first port in the list is
// port #0 and the third port in the list is port #2.
println(Serial.list());
// Open the port that the Arduino board is connected to (in this case #0)
// Make sure to open the port at the same speed Arduino is using (9600bps)
port = new Serial(this, Serial.list()[0], 9600);
}
// function to test if mouse is over square
boolean mouseOverRectA()
{
return ((mouseX >= 0)&&(mouseX = 0)&(mouseY = 301)&&(mouseX = 0)&(mouseY = 601)&&(mouseX = 0)&(mouseY = 0)&&(mouseX = 301)&(mouseY = 301)&&(mouseX = 301)&(mouseY = 601)&&(mouseX = 301)&(mouseY <= 600));
}
void draw()
{
background(#FFFFFF);
stroke(255);
line(0, 295, 700, 295);
strokeWeight(2);
if(mouseOverRectA()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('A'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('B'); // send an 'L' otherwise
}
rect(0, 0, 300, 300); // draw square
if(mouseOverRectB()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('C'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('D'); // send an 'L' otherwise
}
rect(300, 0, 300, 300); // draw square
if(mouseOverRectC()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('E'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('F'); // send an 'L' otherwise
}
rect(600, 0, 300, 300); // draw square
if(mouseOverRectD()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('G'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('H'); // send an 'L' otherwise
}
rect(0, 300, 300, 300); // draw square
if(mouseOverRectE()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('I'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('J'); // send an 'L' otherwise
}
rect(300, 300, 300, 300); // draw square
if(mouseOverRectF()) // if mouse is over square
{
fill(#FF0000); // change color
port.write('K'); // send an 'H' to indicate mouse is over square
} else {
fill(#FFFFFF); // change color
port.write('L'); // send an 'L' otherwise
}
rect(600, 300, 300, 300); // draw square
}[/sourcecode]
Arduino Code
[sourcecode language='cpp']
int outputPin = 13;
int val;
void setup()
{
Serial.begin(9600);
pinMode(outputPin, OUTPUT);
}
void loop()
{
if (Serial.available()) {
val = Serial.read();
if (val == 'A') {
digitalWrite(2, HIGH);
}
if (val == 'B') {
digitalWrite(2, LOW);
}
if (val == 'C') {
digitalWrite(3, HIGH);
}
if (val == 'D') {
digitalWrite(3, LOW);
}
if (val == 'E') {
digitalWrite(4, HIGH);
}
if (val == 'F') {
digitalWrite(4, LOW);
}
if (val == 'G') {
digitalWrite(5, HIGH);
}
if (val == 'H') {
digitalWrite(5, LOW);
}
if (val == 'I') {
digitalWrite(6, HIGH);
}
if (val == 'J') {
digitalWrite(6, LOW);
}
}
}
[/sourcecode]
Hardware: Each LED is directly connected to Digital Pins 1-6 and Ground.
 I am also considering creating this same model with 3 cameras instead of 1. This would allow the software to recognize not just the absolute position on the x axis, but on the Y and Z as well, so a child could place buildings on top of one another. Below is a basic state diagram:
I am also considering creating this same model with 3 cameras instead of 1. This would allow the software to recognize not just the absolute position on the x axis, but on the Y and Z as well, so a child could place buildings on top of one another. Below is a basic state diagram: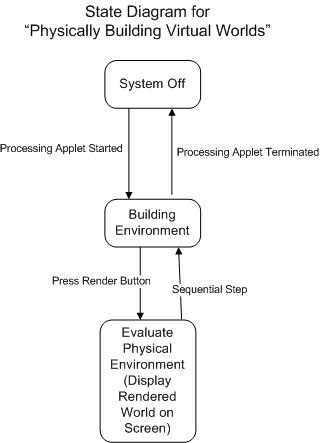 Specific Software List:ProcessingreacTIVisionFrameworkRuby SketchUp APIFurther Down The Road: Rather then just build a snap shot of a Virtual World at one point, children could use this to script and direct their own movies. They could press a record button, and it would record the moving of their boat from point A to B, and then the person getting out of the boat and walking into the building. Add the functionality of recording sound, and they can create some great movies very simply.
Specific Software List:ProcessingreacTIVisionFrameworkRuby SketchUp APIFurther Down The Road: Rather then just build a snap shot of a Virtual World at one point, children could use this to script and direct their own movies. They could press a record button, and it would record the moving of their boat from point A to B, and then the person getting out of the boat and walking into the building. Add the functionality of recording sound, and they can create some great movies very simply.

